
Li-Qun “Larry” Zhang, Professor
In the Neuromechanics Laboratory, we develop rehabilitation protocols to evaluate and treat neurological impairments and musculoskeletal injuries.
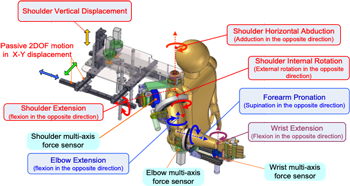
Multi-Joint/Multi-DOFs Diagnosis and Treatment of Neurologically Impaired Arms
This project provides a robot-aided diagnosis and passive-active arm motor and sensory rehabilitation post stroke. The objectives are threefold: (1) quantify the progression of neuromechanical properties throughout the upper extremity during recovery from stroke, (2) address allocation of therapy resources between the arm and hand, and (3) examine the benefits of combining passive stretching with active movement training. It captures the timeline for the advent of specific complications such as spasticity in the different joints and the extent to which they change over time and provides a guide for treatment. It investigates and assesses rehabilitation paradigms for targeting the multiple joints in the arm and/or the multiple fingers of the hand. Passive stretching and its interactions with active movement therapy are investigated. The multi-joint IntelliArm rehabilitation robot is capable of controlling and measuring the shoulder, elbow and wrist simultaneously in order to carry out multi-joint sensorimotor characterizations, forceful stretching, and robot-guided active movement training. The hand rehabilitation robot actuates each digit, allowing for stretching and movement assistance customized for each subject. Subacute stroke survivors participate in a blinded, controlled longitudinal intervention trial. Outcome evaluations in stroke survivors capture changes both in clinical measures of upper extremity performance and in neuromechanical properties. The study seeks to provide important data for deciding how best to devote limited resources to therapy.

Rehabilitation of Lower Limb Injuries or neurological disorders through Novel Offaxis Stepping Training
Although primary knee motions occur in knee flexion/extension, traumatic knee injuries and knee osteoarthritis (OA) are mostly caused by excessive off-axis loadings (frontal plane knee abduction/adduction and/or axial plane tibial rotation loadings), especially the knee adduction moment, which is related to the most common medial compartment knee OA. Similarly, the development and progression of knee OA are associated with excessive off-axis loadings to the knee.
There has been a lack of rehabilitation protocols and devices to diagnose specific off-axis loadings associated with knee injuries and OA, followed by rehabilitation training of off-axis neuromuscular control and reducing excessive off-axis joint loads in clinical practice. We seek to address these needs and conduct neuromuscular rehabilitation training using a multi-axis evaluation and stepping training system, which assesses major-axis and off-axis sensorimotor impairments, provides subject-specific real-time feedback on controlling excessive off-axis knee joint loads associated with OA development without using major gait laboratory equipment. The offaxis training guides patients to improve off-axis sensory-motor performance during functional stepping movements, and potentially mitigates OA based on the impairment/injury-specific neuromuscular training. The robot-aided off-axis stepping training has been investigated on adults with knee injuries, older adults with knee OA, and children with cerebral palsy and in-toeing gait.
Virtual Reality Games
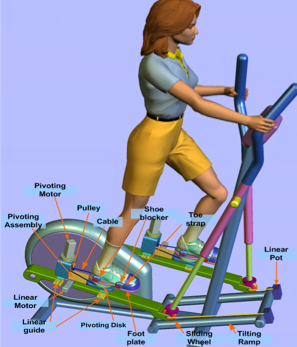
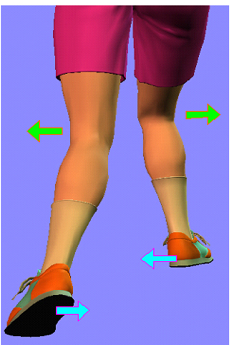
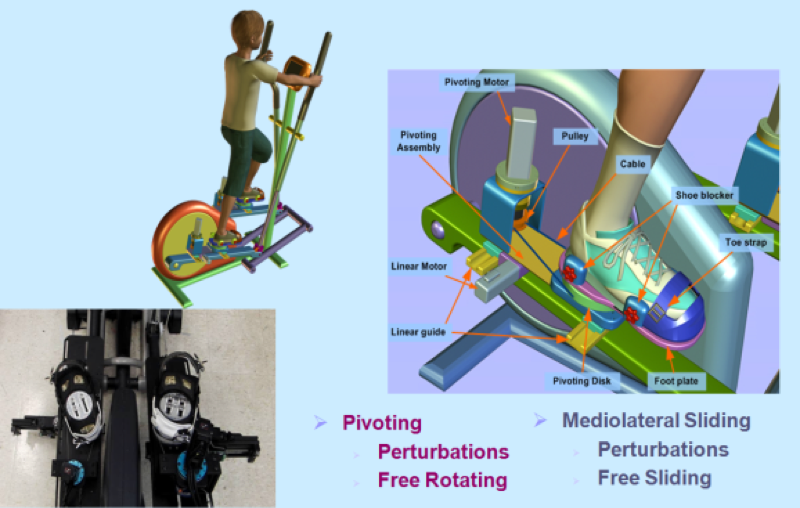
Developing a Pivoting-Sliding Elliptical System to Improve Off-Axis Neuromuscular Control in patients with Orthopedic Disabilities
The novel off-axis rehabilitation system is used to train children with severe orthopaedic disabilities so that children could improve neuromuscular control in the off-axis (minor-axis) including axial and frontal planes, related to maintaining postural stability and lateral and axial stability.
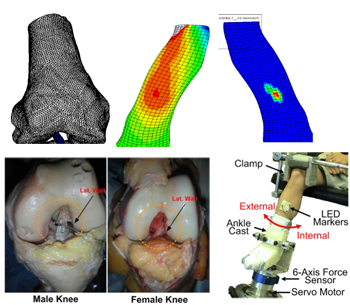
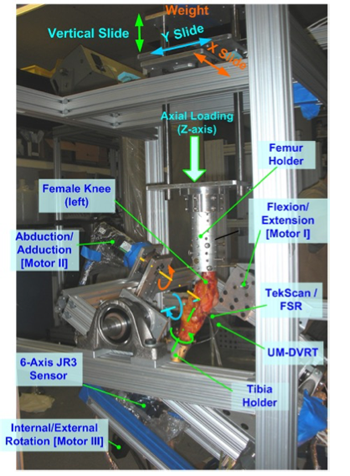
Biomechanics Related to ACL Injury
We investigate a potential ACL injury mechanism associated with ACL impingement against the intercondylar notch, and in-vitro/in-vivo experiments on biomechanical properties of the knee, and develop novel impairment-specific rehabilitation training program. Multi-axis biomechanical properties of the knee are investigated in vivo on human subjects and in vitro on cadaver specimens.
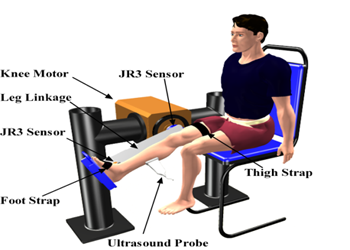
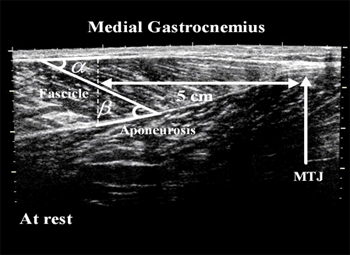
In vivo evaluations of biomechanical changes at the fascicle (using ultrasonography) and joint levels in stroke
We investigate lower limb muscles at both the joint and muscle fiber levels associated with spasticity/contracture.
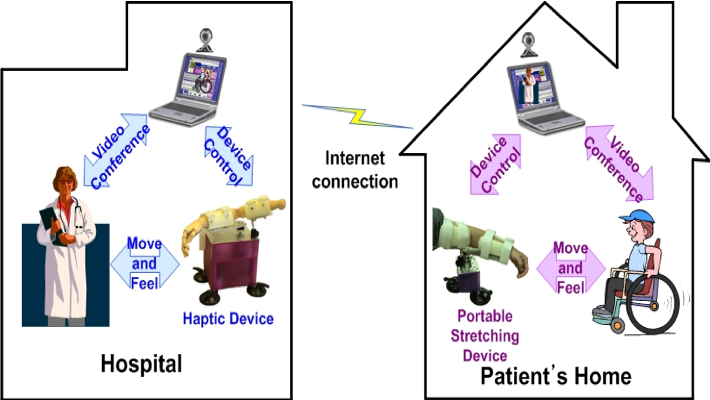
Low-Cost Portable Telerehabilitation System
We develop a telerehabilitation system capable of remote diagnosis, treatment, and evaluation. With the telerehabilitation system, clinicians can haptically feel the patient’s impaired joint remotely.
We investigate neuromuscular and biomechanical impairments, functional limitations, and novel interventions to improve movement in multiple conditions across the lifespan.
Focus Areas
- Power training
- Balance control
- Sensorimotor control and learning
- Gait and functional mobility
- Vestibular
Faculty